Get info
Read More About Our Project
You are allowed 100% to download and use our code and strategies. You are not allowed to
redistribute this content on any other website without a permission from us.
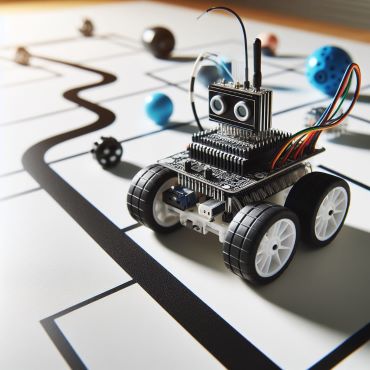
Welcome to MechMinds'
comprehensive guide on creating a line following robot! In this wiki page, we'll walk you through the
step-by-step process of building your very own line following robot, a fundamental project in the realm of
robotics.
Introduction to Line Following Robots:
A line following robot is an autonomous robot that can detect and follow a line or path marked on the ground. These robots are commonly used in various applications such as industrial automation, warehouse management, and educational projects. Building a line following robot not only enhances your understanding of robotics principles but also provides hands-on experience in programming and hardware integration.